Правило сложения векторных величин. Формула равнодействующей силы. Как выполняется сложение по правилу параллелограмма
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Определение 1
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая , которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Определение 2Для сложения 2 -х сил используют правило параллелограмма (рисунок 1).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
Определение 3
При необходимости сложения более 2 -х сил используют правило многоугольника
: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.

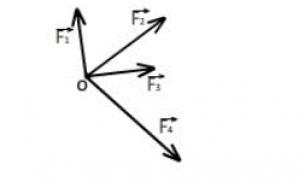
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Определение 4
Линией действия силы называют прямую, проходящую через вектор силы.

Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0: ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Определение 5Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.

Рисунок 4 . Разложение вектора силы по направлениям
Пример 2
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а).

Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную - F 1 → (рисунок 5 в). В итоге получаем искомую силу F → .
Пример 3
Три силы F 1 → = 1 Н; F 2 → = 2 Н; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение

Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β - F 3 cos γ = F x = 4 - 3 3 2 ≈ - 0 , 6 Н.
Точно также для проекций на ось O Y: - F 2 sin β + F 3 sin γ = F y = 3 - 2 3 2 ≈ - 0 , 2 Н.
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н.
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в):
t g φ = F y F x = 3 - 2 3 4 - 3 3 ≈ 0 , 4 .
Пример 4
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение

Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С. На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С. Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н;
F 2 → = F cos β ≈ 1155 Н.
Ответ: F 1 → = 557 Н; F 2 → = 1155 Н.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Как происходит сложение векторов, не всегда понятно ученикам. Дети не представляют того, что за ними скрывается. Приходится просто запоминать правила, а не вдумываться в суть. Поэтому именно о принципах сложения и вычитания векторных величин требуется много знаний.
В результате сложения двух и более векторов всегда получается еще один. Причем он всегда обязательно будет одинаковым, независимо от приема его нахождения.
Чаще всего в школьном курсе геометрии рассматривается сложение двух векторов. Оно может быть выполнено по правилу треугольника или параллелограмма. Эти рисунки выглядят по-разному, но результат от действия один.
Как происходит сложение по правилу треугольника?
Оно применяется тогда, когда векторы неколлинеарные. То есть не лежат на одной прямой или на параллельных.
В этом случае от некоторой произвольной точки нужно отложить первый вектор. Из его конца требуется провести параллельный и равный второму. Результатом станет вектор, исходящий из начала первого и завершающийся в конце второго. Рисунок напоминает треугольник. Отсюда и название правила.
Если векторы коллинеарные, то это правило тоже можно применять. Только рисунок будет расположен вдоль одной линии.
Как выполняется сложение по правилу параллелограмма?
Опять же? применяется только для неколлинеарных векторов. Построение выполняется по другому принципу. Хотя начало такое же. Нужно отложить первый вектор. И от его начала - второй. На их основе достроить параллелограмм и провести диагональ из начала обоих векторов. Она и будет результатом. Так выполняется сложение векторов по правилу параллелограмма.

До сих пор их было два. А как быть, если их 3 или 10? Использовать следующий прием.
Как и когда применяется правило многоугольника?
Если требуется выполнить сложение векторов, число которых — больше двух, пугаться не стоит. Достаточно последовательно отложить их все и соединить начало цепочки с ее концом. Этот вектор и будет искомой суммой.
Какие свойства действительны для действий с векторами?
О нулевом векторе. Которое утверждает, что при сложении с ним получается исходный.
О противоположном векторе. То есть о таком, который имеет противоположное направление и равное по модулю значение. Их сумма будет равна нулю.
О коммутативности сложения. То, что известно еще с начальной школы. Смена мест слагаемых не приводит к изменению результата. Другими словами, неважно какой вектор откладывать сначала. Ответ все равно будет верным и единственным.
Об ассоциативности сложения. Этот закон позволяет складывать попарно любые векторы из тройки и к ним прибавлять третий. Если записать это с помощью знаков, то получится следующее:
первый + (второй + третий) = второй + (первый + третий) = третий + (первый + второй).

Что известно о разности векторов?
Отдельной операции вычитания не существует. Это связано с тем, что оно, по сути, является сложением. Только второму из них задается противоположное направление. А потом все выполняется так, как если бы рассматривалось сложение векторов. Поэтому об их разности практически не говорят.
Для того чтобы упростить работу с их вычитанием, видоизменено правило треугольника. Теперь (при вычитании) второй вектор нужно отложить из начала первого. Ответом будет тот, что соединяет конечную точку уменьшаемого с ней же вычитаемого. Хотя можно и откладывать так, как было описано ранее, просто изменив направление второго.
Как найти сумму и разность векторов в координатах?
В задаче даны координаты векторов и требуется узнать их значения для итогового. При этом построений выполнять не нужно. То есть можно воспользоваться несложными формулами, которые описывают правило сложения векторов. Они выглядят так:
а (х, у, z) + в (k, l, m) = с (х+k, y+l, z+m);
а (х, у, z) -в (k, l, m) = с (х-k, y-l, z-m).
Легко заметить, что координаты нужно просто сложить или вычесть в зависимости от конкретного задания.

Первый пример с решением
Условие. Дан прямоугольник АВСД. Его стороны равны 6 и 8 см. Точка пересечения диагоналей обозначена буквой О. Требуется вычислить разность векторов АО и ВО.
Решение. Сначала нужно изобразить эти векторы. Они направлены от вершин прямоугольника к точке пересечения диагоналей.
Если внимательно посмотреть на чертеж, то можно увидеть, что векторы уже совмещены так, чтобы второй из них соприкасался с концом первого. Вот только его направление неверное. Он должен из этой точки начинаться. Это если векторы складываются, а в задаче — вычитание. Стоп. Это действие означает, что нужно прибавить противоположно направленный вектор. Значит, ВО нужно заменить на ОВ. И получится, что два вектора уже образовали пару сторон из правила треугольника. Поэтому результат от их сложения, то есть искомая разность, — вектор АВ.
А он совпадает со стороной прямоугольника. Для того чтобы записать числовой ответ, потребуется следующее. Начертить прямоугольник вдоль так, чтобы большая сторона шла горизонтально. Нумерацию вершин начинать с левой нижней и идти против часовой стрелки. Тогда длина вектора АВ будет равна 8 см.
Ответ. Разность АО и ВО равна 8 см.

Второй пример и его подробное решение
Условие. У ромба АВСД диагонали равны 12 и 16 см. Точка их пересечения обозначена буквой О. Вычислите длину вектора, образованного разностью векторов АО и ВО.
Решение. Пусть обозначение вершин ромба будет таким же, как в предыдущей задаче. Аналогично решению первого примера получается, что искомая разность равна вектору АВ. А его длина неизвестна. Решение задачи свелось к тому, чтобы вычислить одну из сторон ромба.
Для этой цели потребуется рассмотреть треугольник АВО. Он прямоугольный, потому что диагонали ромба пересекаются под углом в 90 градусов. А его катеты равны половинам диагоналей. То есть 6 и 8 см. Искомая в задаче сторона совпадает с гипотенузой в этом треугольнике.
Для ее нахождения потребуется теорема Пифагора. Квадрат гипотенузы будет равен сумме чисел 6 2 и 8 2 . После возведения в квадрат получатся значения: 36 и 64. Их сумма — 100. Отсюда следует, что гипотенуза равна 10 см.
Ответ. Разность векторов АО и ВО составляет 10 см.
Третий пример с детальным решением
Условие. Вычислить разность и сумму двух векторов. Известны их координаты: у первого — 1 и 2, у второго — 4 и 8.
Решение. Для нахождения суммы потребуется сложить попарно первые и вторые координаты. Результатом будут числа 5 и 10. Ответом будет вектор с координатами (5; 10).
Для разности нужно выполнить вычитание координат. После выполнения этого действия получатся числа -3 и -6. Они и будут координатами искомого вектора.
Ответ. Сумма векторов — (5; 10), их разность — (-3; -6).

Четвертый пример
Условие. Длина вектора АВ равна 6 см, ВС — 8 см. Второй отложен от конца первого под углом в 90 градусов. Вычислить: а) разность модулей векторов ВА и ВС и модуль разности ВА и ВС; б) сумму этих же модулей и модуль суммы.
Решение: а) Длины векторов уже даны в задаче. Поэтому вычислить их разность не составит труда. 6 - 8 = -2. Несколько сложнее обстоит дело с модулем разности. Сначала нужно узнать, какой вектор будет являться результатом вычитания. Для этой цели следует отложить вектор ВА, который направлен в противоположную сторону АВ. Потом от его конца провести вектор ВС, направив его в сторону, противоположную исходному. Результатом вычитания получится вектор СА. Его модуль можно вычислить по теореме Пифагора. Несложные вычисления приводят к значению 10 см.
б) Сумма модулей векторов получается равной 14 см. Для поиска второго ответа потребуется некоторое преобразование. Вектор ВА противоположно направлен тому, который дан — АВ. Оба вектора направлены из одной точки. В этой ситуации можно использовать правило параллелограмма. Результатом сложения будет диагональ, причем не просто параллелограмма, а прямоугольника. Его диагонали равны, значит, модуль суммы такой же, как в предыдущем пункте.
Ответ: а) -2 и 10 см; б) 14 и 10 см.
A) окружность.
C) парабола.
D) траектория может быть любой.
E) прямая.
2. Если тела разделены безвоздушным пространством, то теплопередача между ними возможна
A) теплопроводностью и конвекцией.
B) излучением.
C) теплопроводностью.
D) конвекцией и излучением.
E) конвекцией.
3. Электрон и нейтрон обладают электрическими зарядами
A) электрон – отрицательным, нейтрон – положительным.
B) электрон и нейтрон – отрицательным.
C) электрон – положительным, нейтрон – отрицательным.
D) электрон и нейтрон – положительным.
E) электрон – отрицательным, нейтрон – не имеет заряда.
4. Сила тока необходимая для совершения работы, равной 250 Дж лампочкой, рассчитанной на 4В и в течении 3 минут равна
5. Из атомного ядра в результате самопроизвольного превращения вылетело ядро атома гелия, в результате следующего радиоактивного распада
A) гамма-излучения.
B) двухпротонного распада.
C) альфа-распада.
D) протонного распада.
E) бета- распада.
6. Точка небесной сферы, которая обозначается таким же знаком, как созвездие Рака, это – точка
A) парада планет
B) весеннего равноденствия
C) осеннего равноденствия
D) летнего солнцестояния
E) зимнего солнцестояния
7. Движение грузового автомобиля описывается уравнениями x1= - 270 + 12t, а движение пешехода по обочине того же шоссе – уравнением x2= - 1,5t. Время встречи равно
8. Если тело брошено вверх со скоростью 9 м/с, то максимальной высоты оно достигнет через (g = 10 м/с2)
9. Под действием постоянной силы, равной 4 Н, тело массой8 кгбудет двигаться
A) равноускоренно с ускорением 0,5 м/с2
B) равноускоренно с ускорением 2 м/с2
C) равноускоренно с ускорением 32 м/с2
D) равномерно со скоростью 0,5 м/с
E) равномерно со скоростью 2 м/с
10. Мощность тягового электродвигателя троллейбуса равна 86 кВт. Работа которую может совершить двигатель за 2 ч равна
A) 619200 кДж.
C) 14400 кДж.
E) 17200 кДж.
11. Потенциальная энергия упруго деформированного тела при увеличении деформации в 4 раза
A) не изменится.
B) уменьшится в 4 раза.
C) увеличится в 16 раз.
D) увеличится в 4 раза.
E) уменьшится в 16 раз.
12. Шары массой m1 = 5 г и m2 = 25 г движутся навстречу друг другу со скоростью υ1 = 8 м/с и υ2 = 4 м/с. После неупругого удара скорость шара m1 равна (направление оси координат совпадает с направлением движения первого тела)
13. При механических колебаниях
A) постоянна только потенциальная энергия
B) постоянны и потенциальная энергия, и кинетическая энергия
C) постоянна только кинетическая энергия
D) постоянна только полная механическая энергия
E) энергия постоянна в первую половину периода
14. Если олово находится при температуре плавления, то на плавление4 кголова потребуется количество теплоты, равное (Дж/кг)
15. Электрическое поле напряженностью 0,2 Н/Кл действует на заряд 2 Кл с силой
16. Установите правильную последовательность электромагнитных волн по мере возрастания частоты
1) радиоволны, 2) видимый свет, 3) рентгеновские лучи, 4) инфракрасное излучение, 5) ультрафиолетовое излучение
A) 4, 1, 5, 2, 3
B) 5, 4, 1, 2, 3
C) 3, 4, 5, 1, 2
D) 2, 1, 5, 3, 4
E) 1, 4, 2, 5, 3
17. Ученик режет жесть, прикладывая к ручкам ножниц силу 40 Н. Расстояние от оси ножниц до точки приложения силы35 см, а расстояние от оси ножниц до жести2,5 см. Усилие, необходимое для разрезания жести
18. Площадь малого поршня гидравлического пресса 4см2, а площадь большого 0,01 м2. Сила давления на большой поршень больше, чем сила давления на малый поршень в
B) 0,0025 раз
E) 0,04 раза
19. Газ, расширяясь при постоянном давлении 200 Па совершил работу 1000 Дж. Если первоначально газ занимал объём1,5 м, то новый объём газа равен
20. Расстояние от предмета до изображения в 3 раза больше,чем расстояние от предмета до линзы. Это линза...
A) двояковогнутая
B) плоская
C) собирающая
D) рассеивающая
E) плоско-вогнутая
Механическое действие тел друг на друга всегда является их взаимодействием.
Если тело 1 действует на тело 2, то при этом обязательно тело 2 действует на тело 1.
Например ,на ведущие колеса электровоза (рис.2.3) действуют со стороны рельсов силы трения покоя, направленные в сторону движения электровоза. Сумма этих сил и есть сила тяги электровоза. В свою очередь, ведущие колеса действуют на рельсы силами трения покоя, направленными в противоположную сторону .
Количественное описание механического взаимодействия было дано Ньютоном в его третьем законе динамики.
Для материальных точек этот закон формулируется так:
Две материальные
точки действуют друг на друга с силами,
равными по величине и направленными
противоположно по прямой, соединяющей
эти точки
(рис.2.4):
 .
.
 Третий
закон справедлив не всегда.
Третий
закон справедлив не всегда.
Выполняется строго
в случае контактных взаимодействий,
при взаимодействии находящихся на некотором расстоянии друг от друга покоящихся тел.
Перейдем от
динамики отдельной материальной точки
к динамике механической системы,
состоящей из
 материальных точек.
материальных точек.
Для
 -той
материальной точки системы, согласно
второму закону Ньютона (2.5), имеем:
-той
материальной точки системы, согласно
второму закону Ньютона (2.5), имеем:
 .
(2.6)
.
(2.6)
Здесь
 и
и
 -
масса и скорость
-
масса и скорость -той
материальной точки,
-той
материальной точки,
 - сумма всех действующих на нее сил.
- сумма всех действующих на нее сил.
Силы, действующие на механическую систему, делятся на внешние и внутренние. Внешние силы действуют на точки механической системы со стороны других, внешних тел.
Внутренние силы действуют между точками самой системы .
Тогда силу
 в выражении (2.6) можно представить в виде
суммы внешних и внутренних сил:
в выражении (2.6) можно представить в виде
суммы внешних и внутренних сил:
 ,
(2.7)
,
(2.7)
где
 –
результирующая
всех внешних сил, действующих на
–
результирующая
всех внешних сил, действующих на
 -тую
точку системы
;
-тую
точку системы
;
 -
внутренняя
сила, действующая на эту точку со стороны
-
внутренняя
сила, действующая на эту точку со стороны
 -й
.
-й
.
Подставим выражение (2.7) в (2.6):
 ,
(2.8)
,
(2.8)
просуммировав
левые и правые части уравнений (2.8),
записанных для всех
 материальных точек системы, получаем
материальных точек системы, получаем
 .
(2.9)
.
(2.9)
По третьему закону
Ньютона силы взаимодействия
 -той
и
-той
и
 -й точек системы равны по модулю и
противоположны по направлению
-й точек системы равны по модулю и
противоположны по направлению
 .
.
Поэтому сумма всех внутренних сил в уравнении (2.9) равна нулю:
 .
(2.10)
.
(2.10)
Векторная сумма всех внешних сил, действующих на систему, называется главным вектором внешних сил
 .
(2.11)
.
(2.11)
Поменяв в выражении (2.9) местами операции суммирования и дифференцирования и учитывая результаты (2.10) и (2.11), а также определение импульса механической системы (2.3), получаем

- основное уравнение динамики поступательного движения твердого тела.
Это уравнение выражает закон изменения импульса механической системы : производная по времени от импульса механической системы равна главному вектору внешних сил, действующих на систему.
2.6. Центр масс и закон его движения.
Центром масс
(инерции) механической системы называется
точка
 ,
радиус-вектор которой равен отношению
суммы произведений масс всех материальных
точек системы на их радиус-векторы к
массе всей системы:
,
радиус-вектор которой равен отношению
суммы произведений масс всех материальных
точек системы на их радиус-векторы к
массе всей системы:
 (2.12)
(2.12)
где
 и
и
 -
масса и радиус-вектор
-
масса и радиус-вектор -той
материальной точки,
-той
материальной точки,
 -общее
число этих точек,
-общее
число этих точек,
 –суммарная
масса системы.
–суммарная
масса системы.
Если радиус- векторы
проведены из центра масс
 ,
то
,
то .
.
Таким образом, центр масс – это геометрическая точка , для которой сумма произведений масс всех материальных точек, образующих механическую систему, на их радиус-векторы, проведенные из этой точки, равна нулю.
В случае непрерывного распределения массы в системе (в случае протяженного тела) радиус-вектор центра масс системы:
 ,
,
где r – радиус-вектор малого элемента системы, масса которого равна dm , интегрирование проводится по всем элементам системы, т.е. по всей массе m.
Продифференцировав формулу (2.12) по времени, получаем
выражение для скорости центра масс :

Скорость центра масс механической системы равна отношению импульса этой системы к её массе.
Тогда импульс системы равен произведению ее массы на скорость центра масс:
 .
.
Подставив это выражение в основное уравнение динамики поступательного движения твердого тела, имеем:
 (2.13)
(2.13)
- центр масс механической системы движется как материальная точка, масса которой равна массе всей системы и на которую действует сила, равная главному вектору приложенных к системе внешних сил.
Уравнение (2.13) показывает, что для изменения скорости центра масс системы необходимо, чтобы на систему действовала внешняя сила. Внутренние силы взаимодействия частей системы могут вызвать изменения скоростей этих частей, но не могут повлиять на суммарный импульс системы и скорость ее центра масс.
Если механическая
система замкнутая, то
 и скорость центра масс не изменяется с
течением времени.
и скорость центра масс не изменяется с
течением времени.
Таким образом, центр масс замкнутой системы либо покоится, либо движется с постоянной скоростью относительно инерциальной системы отсчета. Это означает, что с центром масс можно связать систему отсчета, и эта система будет инерциальной.
В соответствии с первым законом Ньютона в инерциальных системах отсчета тело может изменять свою скорость только, если на него действуют другие тела. Количественно взаимное действие тел друг на друга выражают с помощью такой физической величины, как сила (). Сила может изменять скорость тела, как по модулю, так и по направлению. Сила является векторной величиной, у нее есть модуль (величина) и направление. Направление равнодействующей силы определяет направление вектора ускорения тела, на которое действует рассматриваемая сила.
Основной закон, при помощи которого определяют направление и величину равнодействующей силы - это второй закон Ньютона:
где m - масса тела, на которое действует сила ; - ускорение, которое сила сообщает рассматриваемому телу. Сущность второго закона Ньютона состоит в том, что силы, которые действуют на тело, определяют изменение скорости тела, а не просто его скорость. Необходимо помнить, что второй закон Ньютона работает для инерциальных систем отсчета.
В том случае, если на тело действует несколько сил, то их совместное действие характеризуют при помощи равнодействующей силы. Допустим, что на тело действует одновременно несколько сил, при этом тело перемещается с ускорением, равным векторной сумме ускорений, которые появились бы при воздействии каждой из сил в отдельности. Силы, действующие на тело, и приложенные к одной его точке необходимо складывать по правилу сложения векторов. Векторная сумма всех сил, действующих на тело в один момент времени, называется равнодействующей силой ():
При действии на тело нескольких сил, второй закон Ньютона записывают как:

Равнодействующая всех сил, действующих на тело, может быть равна нулю, в том случае, если происходит взаимная компенсация сил, приложенных к телу. В таком случае тело движется с постоянной скоростью или находится в покое.
При изображении сил, действующих на тело, на чертеже, в случае равноускоренного перемещения тела, равнодействующую силу, направленную по ускорению следует изображать длиннее, чем противоположно ей направленную силу (сумму сил). В случае равномерного движения (или покоя) дина векторов сил, направленных в противоположные стороны одинакова.
Для нахождения равнодействующей силы, следует изобразить на чертеже все силы, которые необходимо учитывать в задаче, действующие на тело. Складывать силы следует по правилам сложения векторов.
Примеры решения задач по теме «Равнодействующая сила»
ПРИМЕР 1
| Задание | Небольшой шарик висит на нити, он находится в покое. Какие силы действуют на данный шарик, изобразите их на чертеже. Чему равна равнодействующая сила, приложенная к телу? |
| Решение | Сделаем рисунок.
Рассмотрим систему отсчета связанную с Землей. В нашем случае эту систему отсчета можно считать инерциальной. На шарик, подвешенный на нити действуют две силы: сила тяжести, направленная вертикально вниз () и сила реакции нити (сила натяжения нити): . Так как шарик находится в состоянии покоя, то сила тяжести уравновешивается силой натяжения нити: Выражение (1.1) соответствует первому закону Ньютона: равнодействующая сила, приложенная к телу, находящемуся в покое в инерциальной системе отсчета равна нулю. |
| Ответ | Равнодействующая сила, приложенная к шарику равна нулю. |

ПРИМЕР 2
| Задание | На тело действуют две силы и и , где - постоянные величины. . Чему равна равнодействующая сила, приложенная к телу? |
| Решение | Сделаем рисунок.
Так как векторы силы и перпендикулярные по отношению друг к другу, следовательно, длину равнодействующей найдем как: |